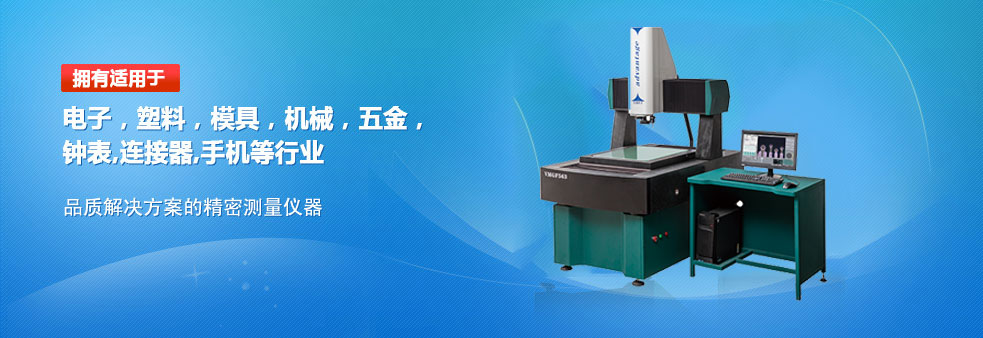

全自動(dòng)影像測(cè)量?jī)x是測(cè)量技術(shù)的高級(jí)階段,具有智能化與自動(dòng)化特點(diǎn)。其優(yōu)異的性能讓坐標(biāo)尺寸測(cè)量變得便捷,擁有基于機(jī)器視覺自動(dòng)學(xué)習(xí)功能,依托儀器高速而精準(zhǔn)的微米級(jí)走位,可將測(cè)量經(jīng)過(guò)的路徑,對(duì)焦、選點(diǎn)、功能切換、人工修正、燈光匹配等過(guò)程自學(xué)并記憶。
我們?cè)趦|輝光電CNC影像測(cè)量?jī)x的平臺(tái)基礎(chǔ)上,進(jìn)行了大量實(shí)驗(yàn),研究出一種在此基礎(chǔ)上的試驗(yàn)篩測(cè)方法,以此為基礎(chǔ)開發(fā)了專用的試驗(yàn)篩測(cè)軟件,可實(shí)現(xiàn)試驗(yàn)篩的自動(dòng)測(cè)量。
二次元影像測(cè)量?jī)x測(cè)量薄壁件中的一個(gè)重要方面是坐標(biāo)。這類零件不像箱體,有基準(zhǔn)平面,基準(zhǔn)線定位元素,不能使用簡(jiǎn)單的建坐標(biāo)方法。而行之有效的方法是有優(yōu)化功能的最佳匹配算法。 根據(jù)邊界條件和誤差控制方法的不同,對(duì)各種典型情況,最佳匹配的坐標(biāo)找正有多
全自動(dòng)影像測(cè)量?jī)x基于特征的圖像配準(zhǔn)方法一般分三步:(1)特征提取,它是圖像配準(zhǔn)的關(guān)鍵。常用特征有線交叉點(diǎn)、曲面高點(diǎn)、物體輪廓、閉合區(qū)域等。
二次元影測(cè)量?jī)x標(biāo)定的目的是根據(jù)誤差分析的基本原理和實(shí)測(cè)信息構(gòu)造誤差函數(shù),誤差最小化是目標(biāo),進(jìn)而辨識(shí)該儀器的合理誤差,即使用中應(yīng)該保證的精度。
光學(xué)投影儀測(cè)量精度低,人為誤差大。光學(xué)投影儀可測(cè)量范圍小,只能測(cè)量到工件的外形輪廓,不能看清楚工件上表面上的圖像,不能對(duì)上表面進(jìn)行檢測(cè)。
全自動(dòng)影像測(cè)量?jī)x利用光的反射原理,通過(guò)圖像傳感器拍攝工件影像進(jìn)行處理測(cè)量。而傳統(tǒng)的 CMM 利用接觸式測(cè)頭獲取空間點(diǎn)坐標(biāo),通過(guò)計(jì)算得到被測(cè)物體的幾何參數(shù)
全自動(dòng)影像測(cè)量?jī)x要放在清洗干燥的房間里,室溫控制在20℃±50C,濕度低于60%,可防止光學(xué)零件發(fā)霉,金屬零件生銹,塵土雜物落到導(dǎo)軌里,影響全自動(dòng)影像測(cè)量?jī)x的測(cè)量準(zhǔn)確度。
二次元影像測(cè)量?jī)x主要用在平面的測(cè)量,基本上可以把所有可以用肉眼看得見的尺寸全部測(cè)量出來(lái)(當(dāng)然需要專業(yè)的技術(shù)技巧),唯一的缺點(diǎn)是不可以測(cè)深度
從全自動(dòng)影像測(cè)量?jī)x的測(cè)量原理中可以看出數(shù)學(xué)處理在全部測(cè)量進(jìn)程中所起到的作用,而對(duì)誤差的剖析則更是離不開數(shù)學(xué)運(yùn)算,包含比如:幾何元素的基本還原算法、曲面曲線擬合、回歸算法、誤差剖析與分化算法等等。